Discovery
What is Service Register Discovery?
For students who are involved in microservices, the concepts of service registration and service discovery should not be too unfamiliar.
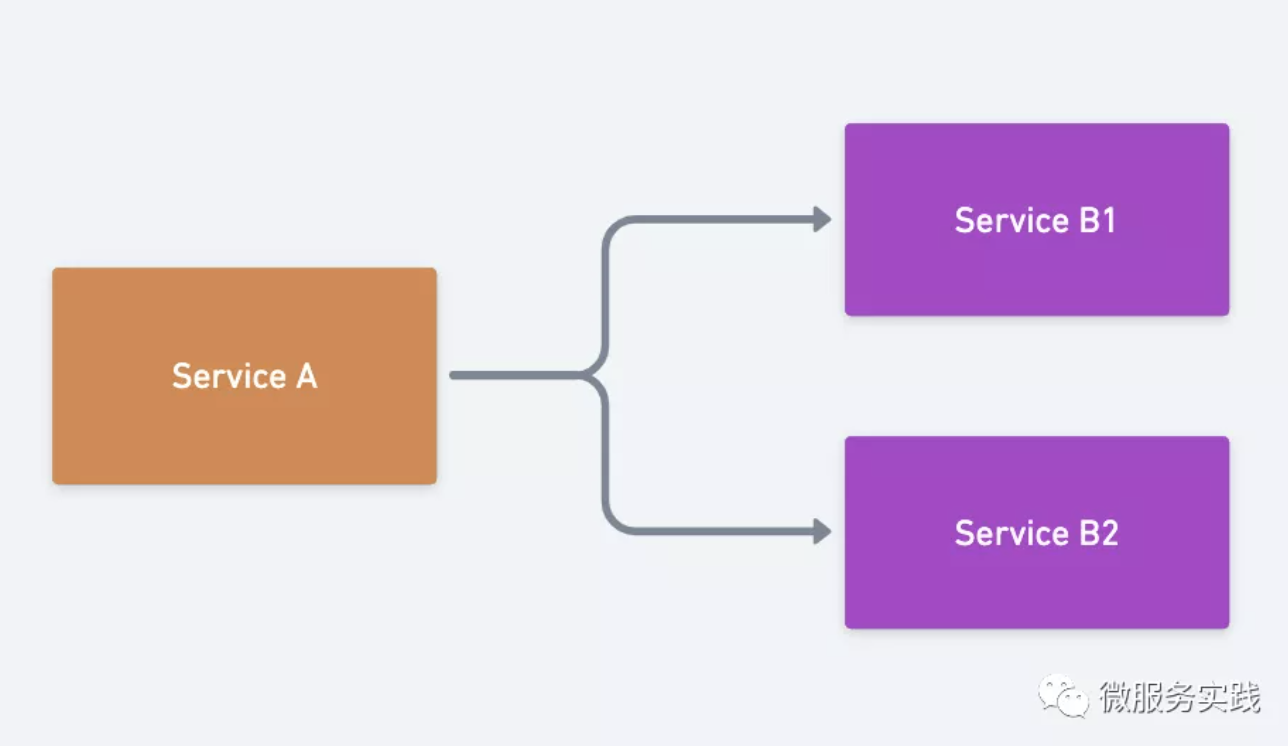
Simply put, when Service A needs to rely on Service B, we need to tell Service A where to invoke Service B. This is the problem to be solved by service registration and discovery.
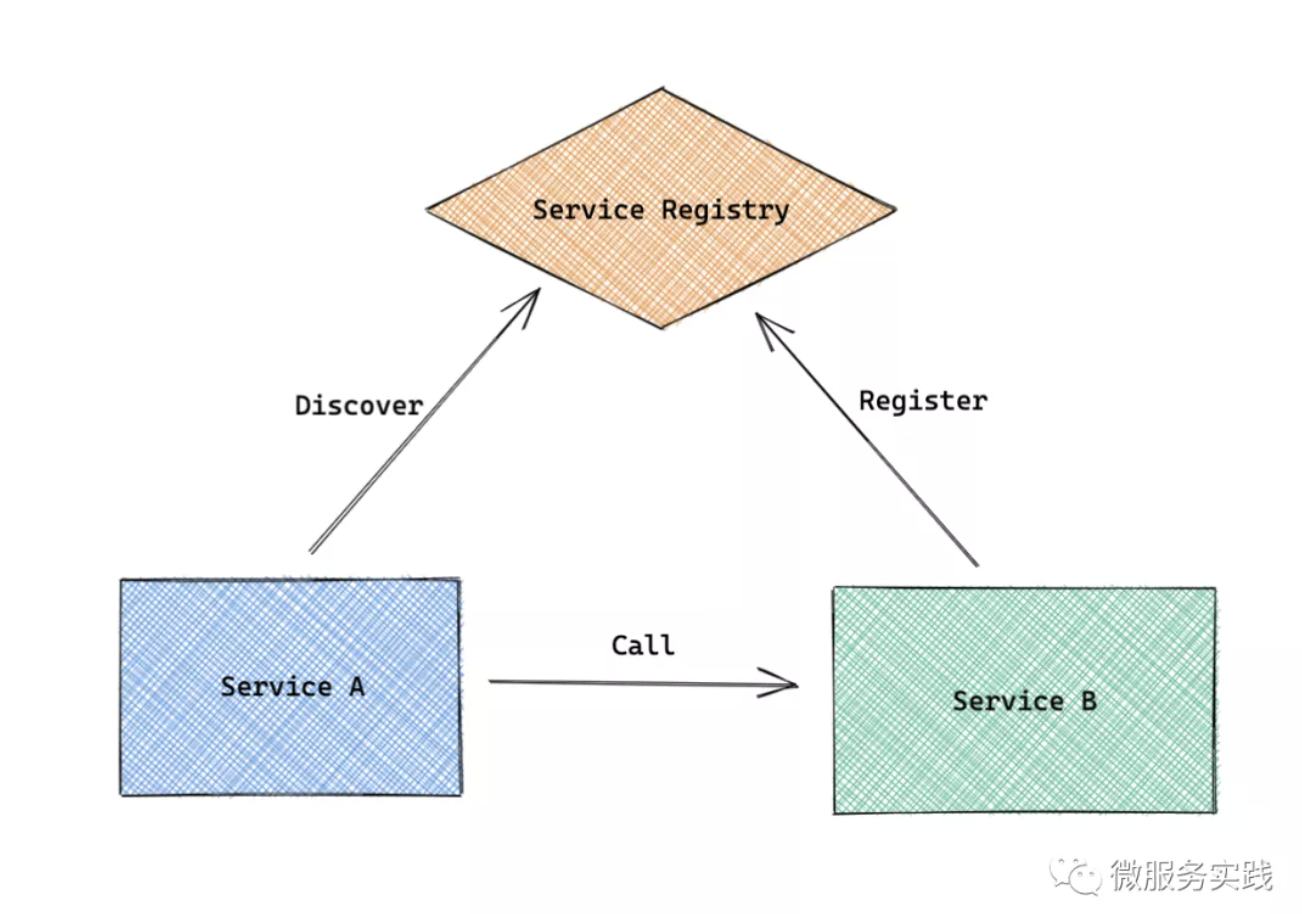
- Service B registers itself with the Service Registry, called Service Registration
- Service A's discovery of Service B's node information from Service Registry is called Service Discovery
Service Register
Service registration is for the server side and is required after the service is started and is divided into several parts.
- Start-up registration
- Timed renewal
- Withdrawal
Start Register
When a service node is up, it needs to register itself to the Service Registry to make it easy for other nodes to discover itself. The registration needs to be done when the service is up and ready to accept requests, and an expiration date is set to prevent the process from being accessed even after an abnormal exit.
Scheduled Renewal
Scheduled renewals are equivalent to keep alive, telling the Service Registry periodically that it is still alive and can continue to serve.
Withdrawal
When the process exits, we should actively go to deregister information to facilitate the caller to distribute the request to another node in time. Meanwhile, go-zero ensures that even if a node exits without active deregistration by adaptive load balancing, the node can be taken off in time.
Service Discovery
Service discovery is for the calling end and generally falls into two categories of issues.
- Stock acquisition
- Incremental Listening
There is also a common engineering problem of
- Responding to service discovery failures
When a service discovery service (such as etcd, consul, nacos, etc.) goes down, we do not modify the list of endpoints that we have already acquired, so that we can better ensure that the services that depend on etcd, etc., can still interact normally after they go down.
Stock Acquisition
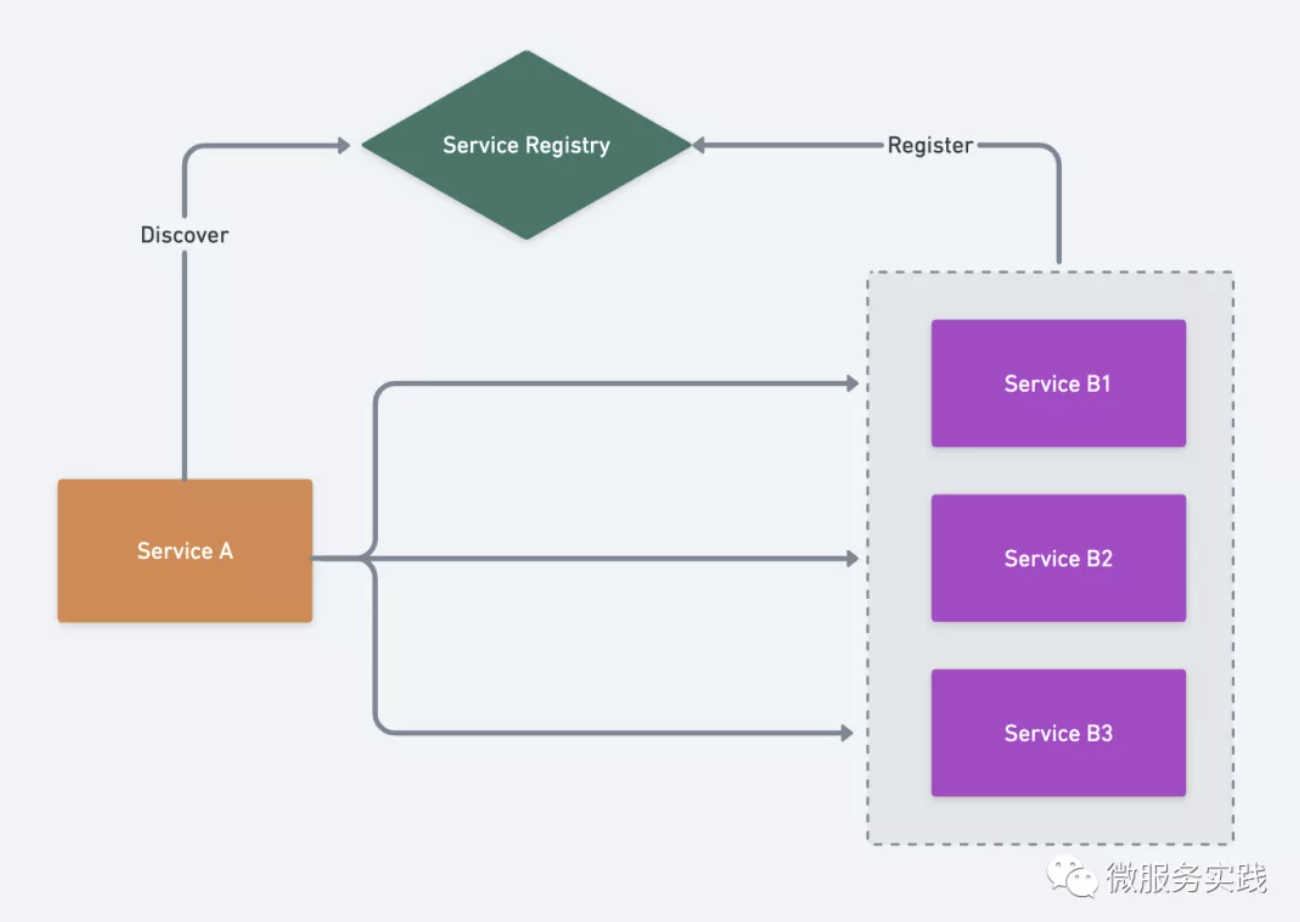
When Service A starts, it needs to get the list of existing nodes of Service B from Service Registry: Service B1, Service B2, Service B3, and then select the appropriate nodes to send requests according to its own load balancing algorithm.
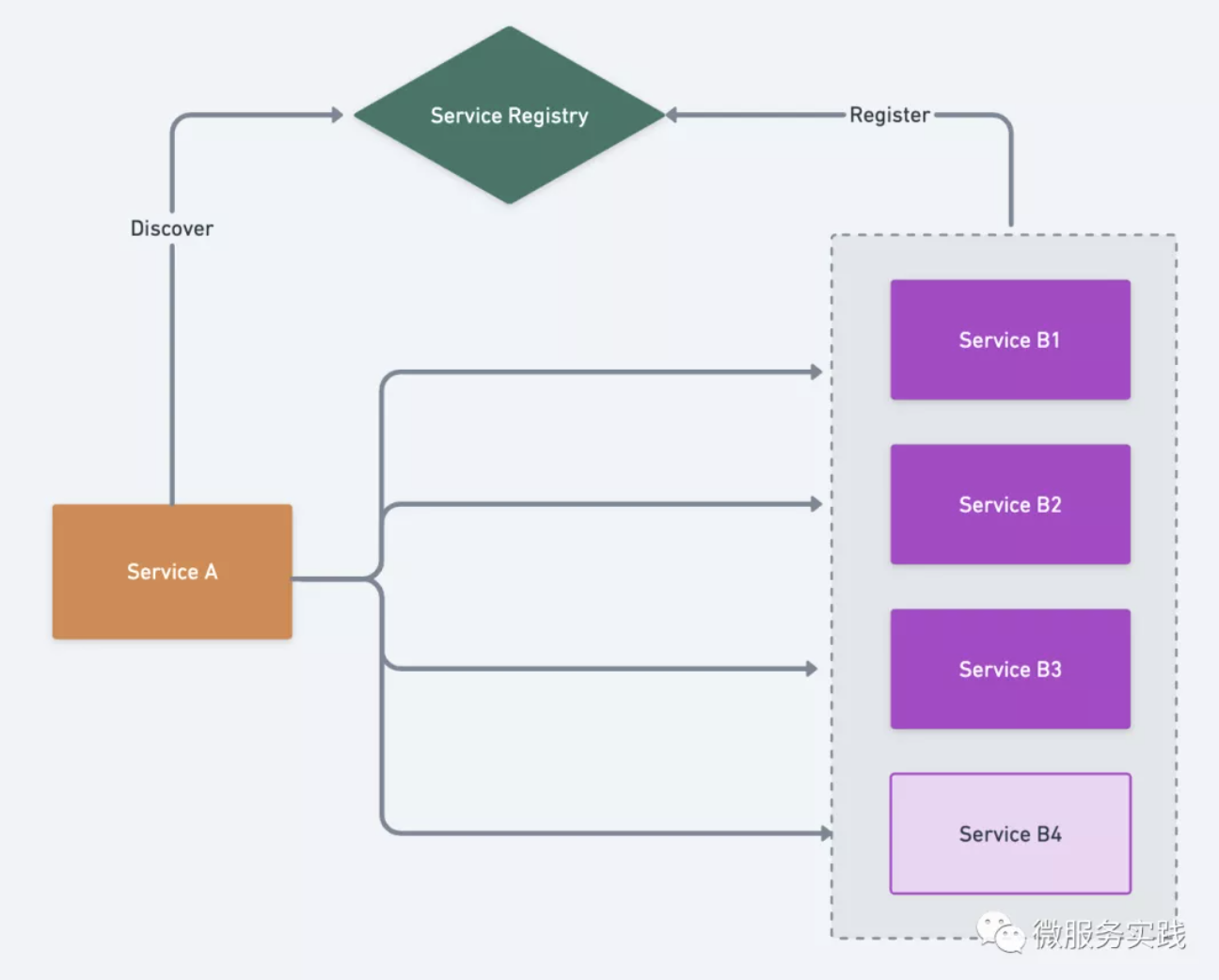
Incremental Listening
The above diagram already has Service B1, Service B2, Service B3, if Service B4 is started, then we need to notify Service A that there is a new node. As shown in the figure.
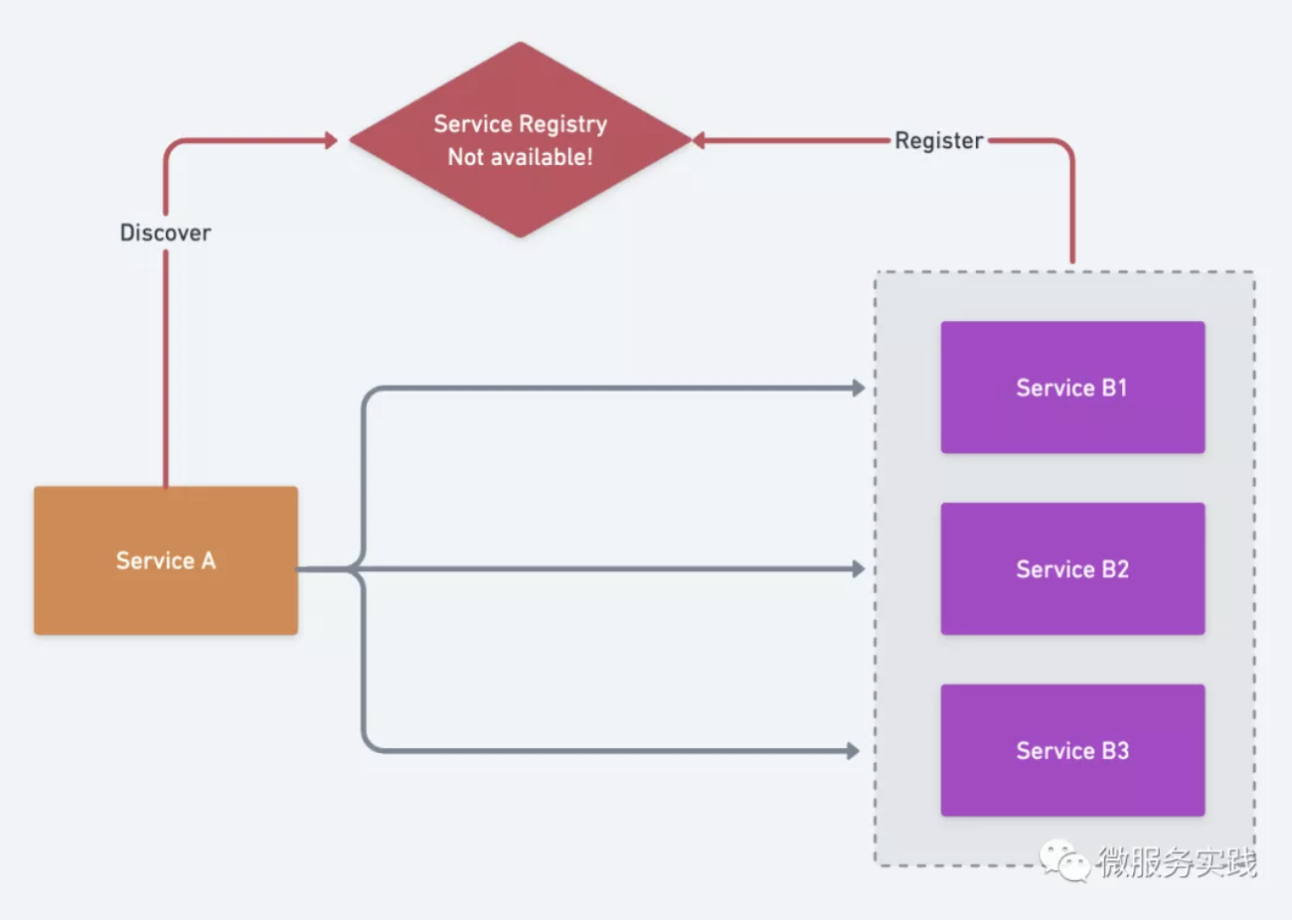
Responding to service discovery failures
For the service caller, we all cache a list of available nodes in memory. Whether we use etcd, consul or nacos, we may face service discovery cluster failures, take etcd as an example, when we encounter etcd failure, we need to freeze the node information of Service B without changing it, we must not empty the node information at this time, once it is empty, we cannot get it, and at this time, the nodes of Service B nodes are likely to be normal, and go-zero will automatically isolate and restore the failed nodes.
The basic principle of service registration and service discovery is roughly the same, but of course it is more complicated to implement, so let's take a look at what service discovery methods are supported in go-zero.
go-zero's internal service discovery
go-zero supports three service discovery methods by default:
- Direct Connect
- etcd-based service discovery
- Service discovery based on kubernetes endpoints
Direct connection
Direct connection is the simplest way, when our service is simple enough, such as a single machine can carry our business, we can directly use only this way.
Just specify endpoints directly in the rpc configuration file, e.g.
Rpc:
Endpoints:
- 192.168.0.111:3456
- 192.168.0.112:3456
The zrpc caller will then allocate the load to both nodes, and when one of the nodes has a problem zrpc will be automatically removed, and the load will be allocated again when the node recovers.
The disadvantage of this approach is that the nodes cannot be added dynamically, and each time a new node is added, the caller's configuration needs to be modified and restarted.
etcd-based service discovery
Once we have a certain scale of services, because a service may be dependent on many services, we need to be able to dynamically add and remove nodes without having to modify many caller configurations and restart them.
Common service discovery schemes are etcd, consul, nacos, etc.
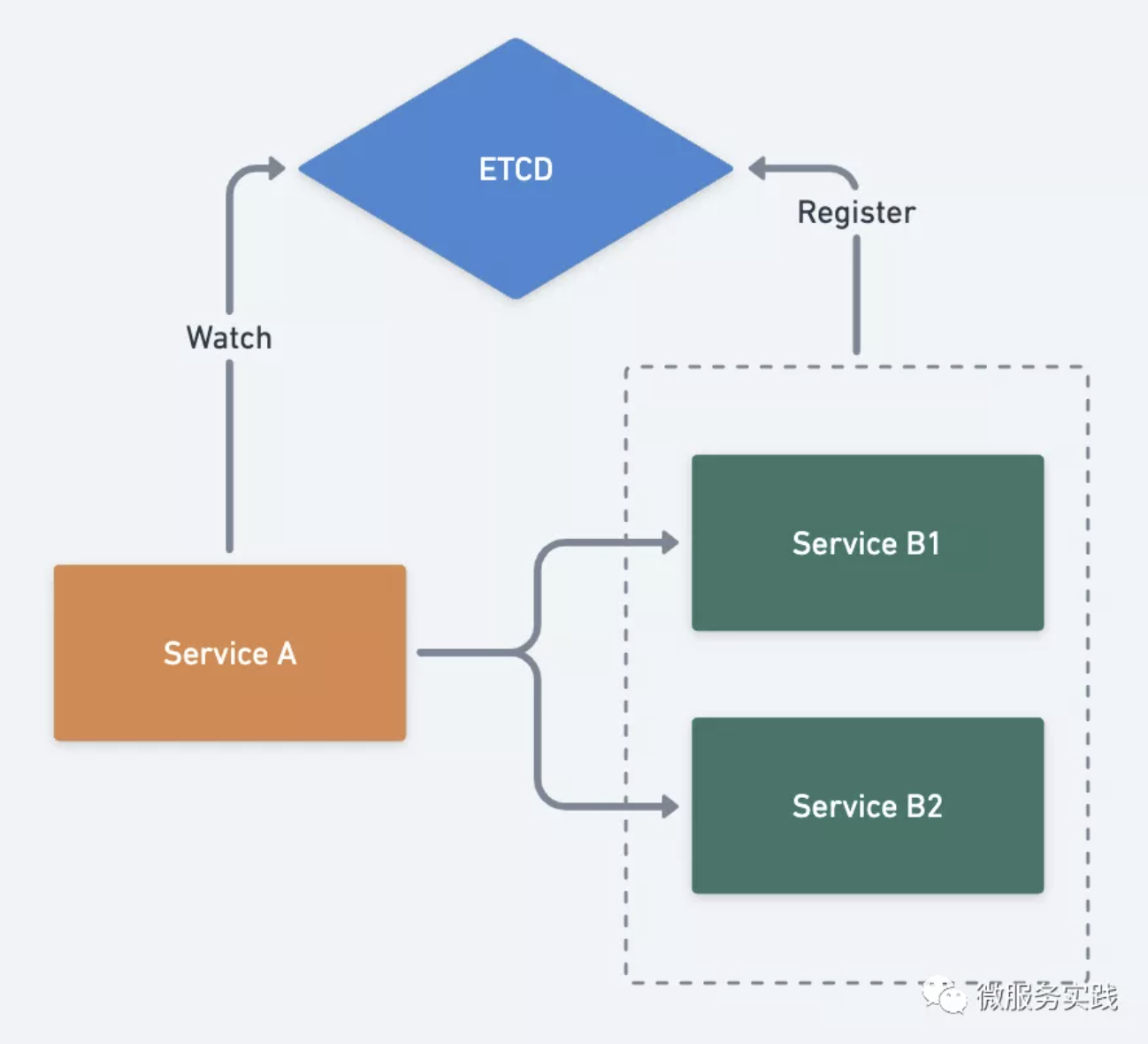
go-zero has a built-in service discovery scheme based on etcd, which is used as follows.
Rpc:
Etcd:
Hosts:
- 192.168.0.111:2379
- 192.168.0.112:2379
- 192.168.0.113:2379
Key: user.rpc
- Hosts is the etcd cluster address
- Key is the key that the service is registered with
Kubernetes Endpoints-based Service Discovery
If our services are deployed on a Kubernetes cluster, Kubernetes itself manages the cluster state through its own etcd, and all services register their node information to Endpoints objects, so we can directly give the deployment permission to read the cluster's Endpoints object to get the node information.
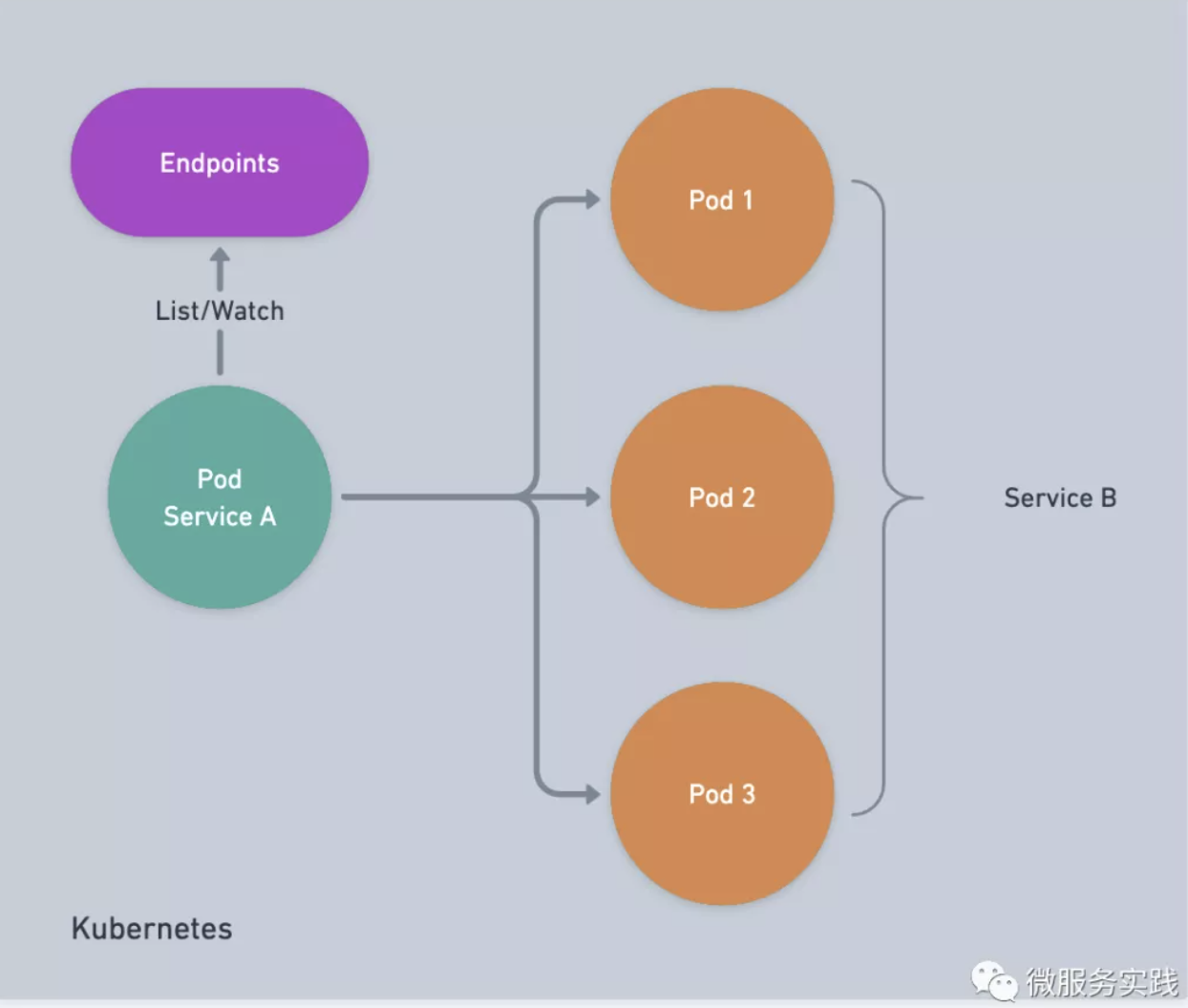
- Each
PodofService Bregisters itself to theEndpointsof the cluster when it starts - Each
PodofService Acan get the node information ofService Bfrom theEndpointsof the cluster when it starts - When the node of
Service Bchanges,Service Acan sense it through theEndpointsof thewatchcluster
Before this mechanism can work, we need to configure the pod within the current namespace to have access to the cluster Endpoints, where there are three concepts.
- ClusterRole
- Defines cluster-wide permission roles, not controlled by namespace
- ServiceAccount
- Defines the namespace-wide service account
- ClusterRoleBinding
- Bind the defined ClusterRole to the ServiceAccount of different namespaces
The specific Kubernetes configuration file can be found here, where namespace is modified as needed.
Note: Remember to check if these configurations are in place when you start up and don't have access to Endpoints :)
zrpc's Kubernetes Endpoints based service discovery is used as follows.
Rpc:
Target: k8s://mynamespace/myservice:3456
where
mynamespace: thenamespacewhere the invokedrpcservice is locatedmyservice: the name of the calledrpcservice3456: the port of the calledrpcservice
Be sure to add serviceAccountName when creating the deployment profile to specify which ServiceAccount to use, as in the following example.
apiVersion: apps/v1
kind: Deployment
metadata:
name: alpine-deployment
labels:
app: alpine
spec:
replicas: 1
selector:
matchLabels:
app: alpine
template:
metadata:
labels:
app: alpine
spec:
serviceAccountName: endpoints-reader
containers:
- name: alpine
image: alpine
command:
- sleep
- infinity
Note that serviceAccountName specifies which ServiceAccount is used for the pod created by the deployment.
After both server and client are deployed to the Kubernetes cluster, you can restart all server nodes on a rolling basis with the following command
kubectl rollout restart deploy -n adhoc server-deployment
Use the following command to view the client node log.
kubectl -n adhoc logs -f deploy/client-deployment --all-containers=true
You can see that our service discovery mechanism follows the changes to the server node perfectly and there are no abnormal requests during the service update.
tip
The full code example is available at https://github.com/zeromicro/zero-examples/tree/main/discovery/k8s